{kind=link}

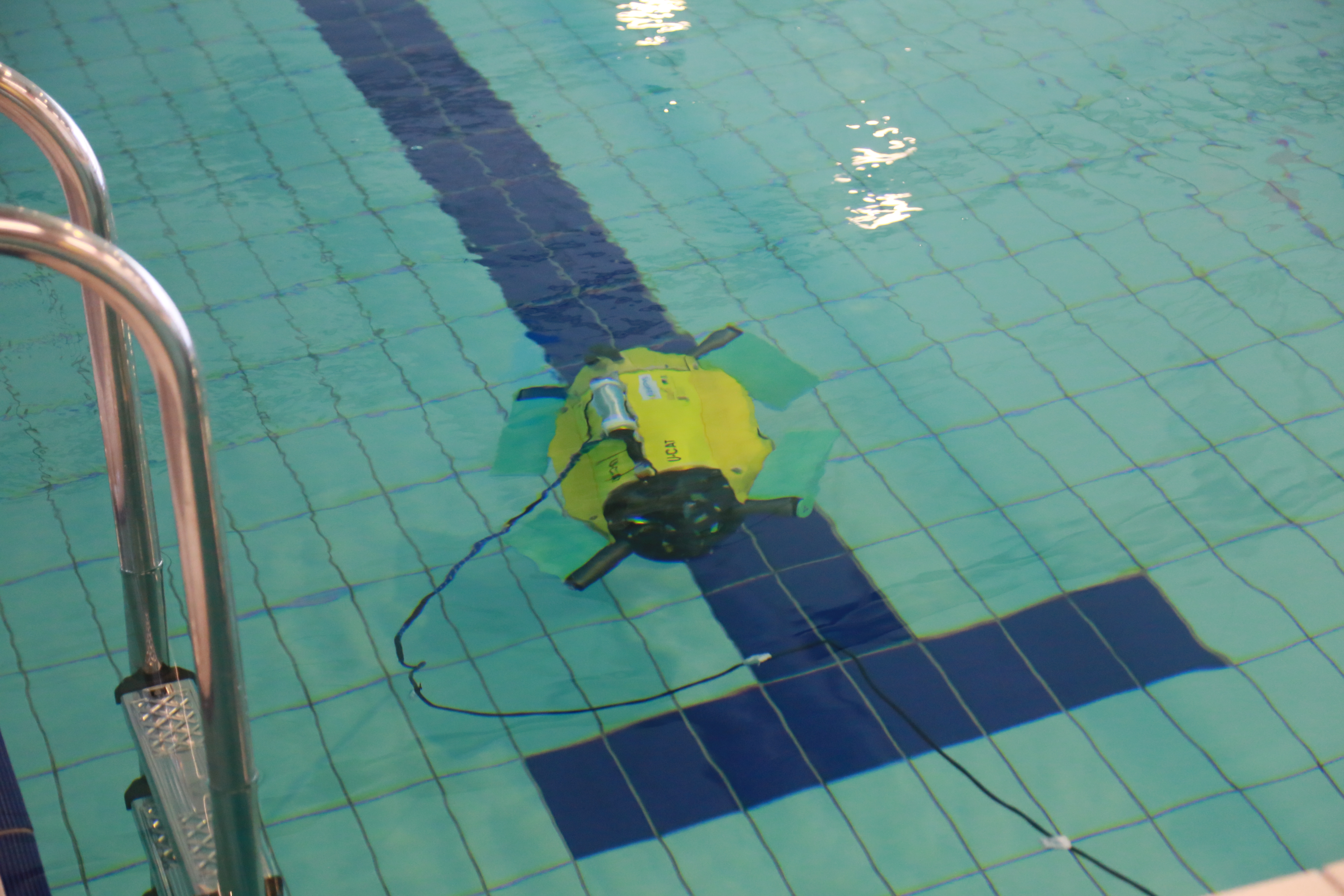
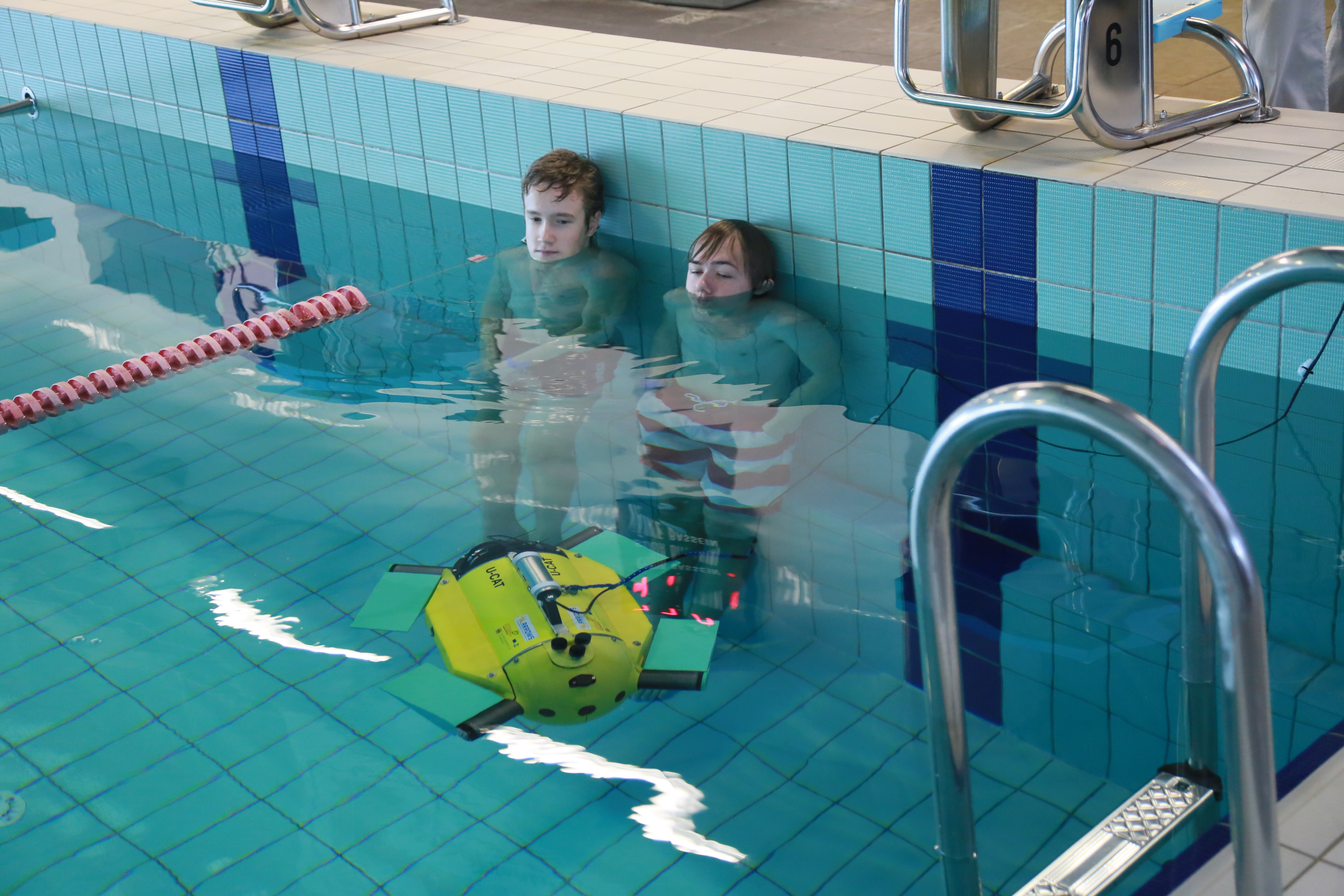
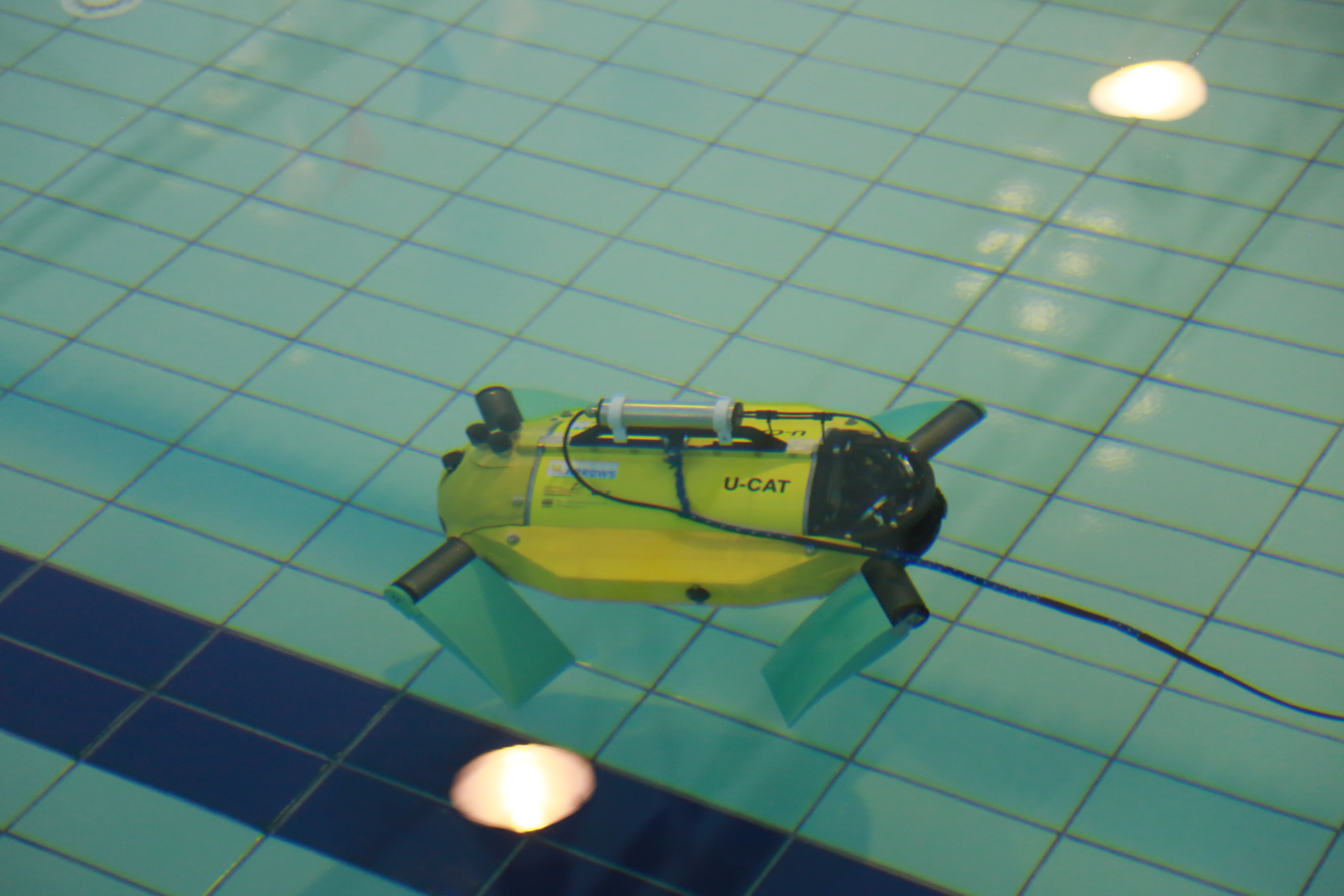
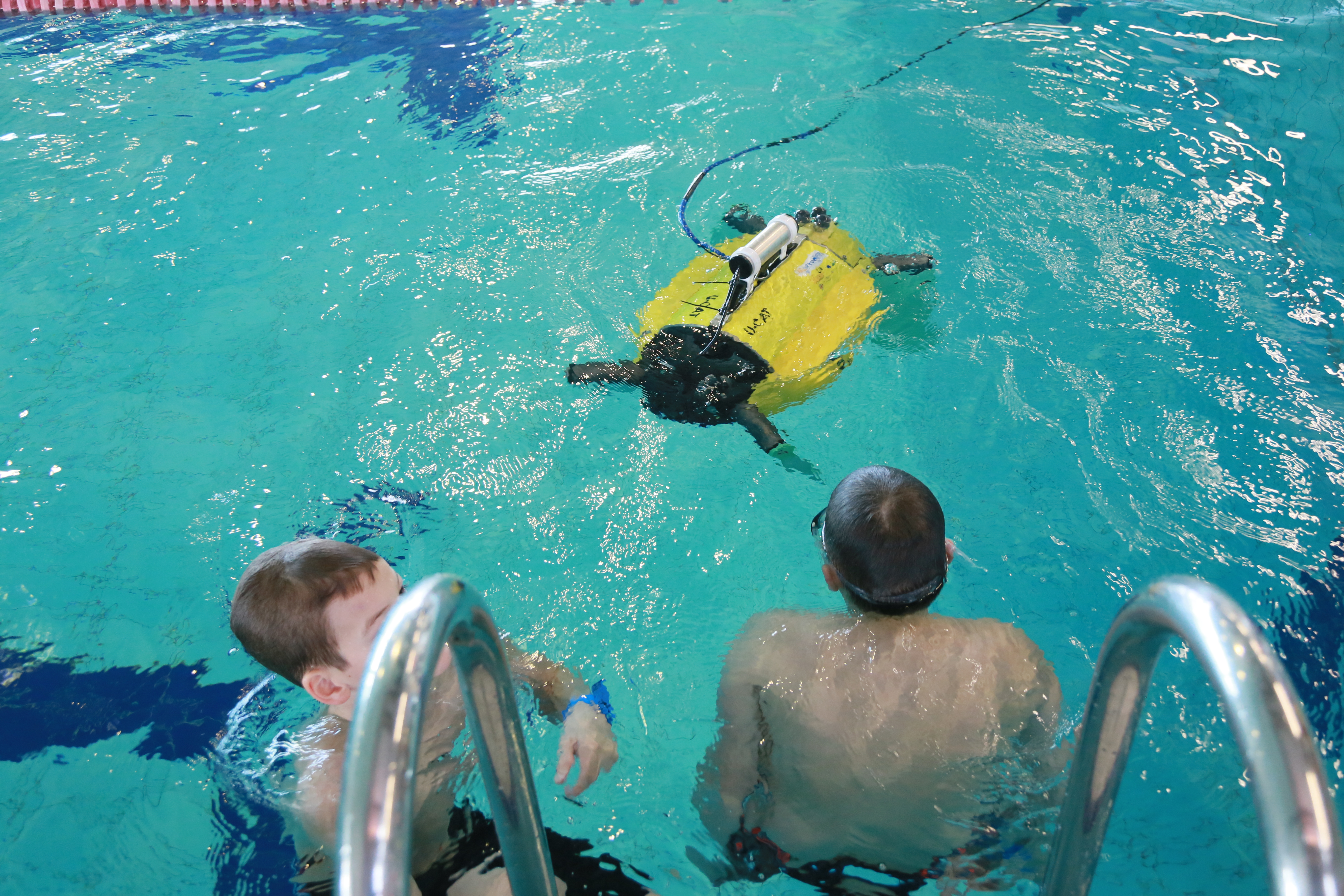
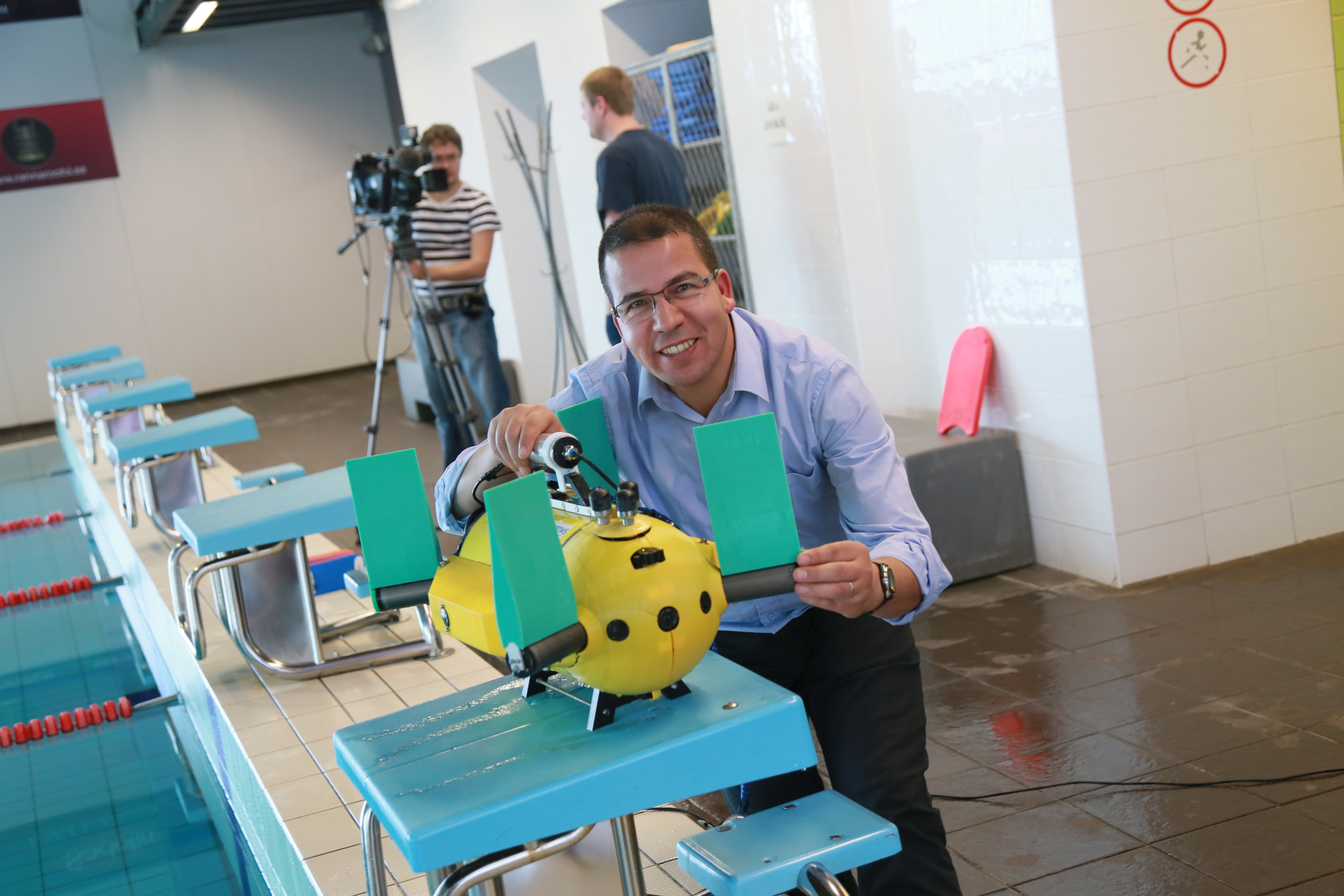
Täna demostreeriti Haapsalu veekeskuses eestlaste ja prantslaste ühist teadusprojekti, mille käigus valmis allveerobot U-Cat.
Roboti ehitamisel on malli võetud kilpkonna anatoomiast. 18 kilogrammi kaaluval robotil on neli sünteetilisest materjalist uime, millega robot end vees liikuma paneb. Prantsuse inseneri Ahmed Chemori sõnul on uimedel tavapärase sõukruvi ees mitmeid eeliseid. „Merepõhjas toimetades ajavad sõukruvid vee liigselt liikuma, misjärel muutub vesi sogaseks,” selgitas Chemori. Ta lisas, et oht juhtmete takerdumiseks igas suunas liikuma uime taha on oluliselt väiksem kui kiiresti pöörleva sõukruvi taha.
Tallinna tehnikaülikooli doktorandi Taavi Salumäe hinnangul on kolme aastaga välja töötatud korralikult funktsioneeriv robotikere. „Palju arendustööd on vaja teha just tarkvaraga,” lisas Salumäe.
Roboti juhtimiseks on kolm võimalust: manuaalne, poolautomaatne ja automaatne. Manuaalse juhtimisviisi puhul juhib robotit täielikult robotioperaator vastava puldiga. Poolautomaatse režiimi puhul saab robot sügavuse hoidmiseks juhiseid arvutilt, kuid liikumist juhib operaator. Automaatne režiim on kõige keerulisem. Roboti trajektoor on programmeeritud koordinaatteljestiku abil arvutisse või arvuti töötleb robotilt laekuvaid andmeid reaalajas ja seejärel juhib roboti takistustest mööda.
Inseneride sõnul on robot ehitatud peamiselt selleks, et uurida merepõhja ja seal lebavaid lennuki- ning laevavrakke.
Salumäe sõnul on Haapsalus demostreeritud robot omataoliste hulgas ainuke. „Peagi on valmimas teinegi,” teatas Salumäe. Ta lisas, et eesmärk on robotit veel edasi arendada ja jõuda selleni, et igal soovijal oleks võimalik allveerobot omale soetada.
Antud allveerobot on võimeline sukelduma kuni 100 meetri sügavusele. „Sügavamal filmimiseks peaks kõiki keredetaile tugevdama, et rõhk robotit laiaks ei litsuks,” selgitas Salumäe.

Allveerobot U-Cat ehitamisel ja arendamisel teevad koostööd Tallinna tehnikaülikool ja Prantsusmaal asuv Montpellier’ ülikooli teaduslaboratoorium LIRMM.
Fotod: Arvo Tarmula